
 产品:36
产品:36

发那科机器人半年度保养与检查
机台点检项目:
机器人本体状态确认1.1 检查本体电缆防护套有无损坏(恶劣环境高温烫坏或金属割伤可能),电缆有无扭曲、电机接头、哈丁头有无水渍,本体平衡缸、手腕油封周围是否有异物(切削和飞溅易导致异常磨损及漏油),本体轴承补充润滑油脂,本体电池检查及更换。

图1 本体电缆及防护检查

图2 控制器与本体连接电缆哈丁头检查

图3 本体轴承磨损检查和补充润滑油脂

图4 本体电机接头检查

图5 本体手腕部检查


图7 本体电池检查及更换(建议每年更换)
控制器开机状态下拆开电池盒,更换新电池(注意正负极安装方向)
1.2 机器人紧固螺栓检查
机器人手抓固定螺栓、机器人管线支架固定螺栓、机器人本体接线盒固定螺栓检查。露出机器人外螺栓检查,紧固螺栓时按标定扭力进行。
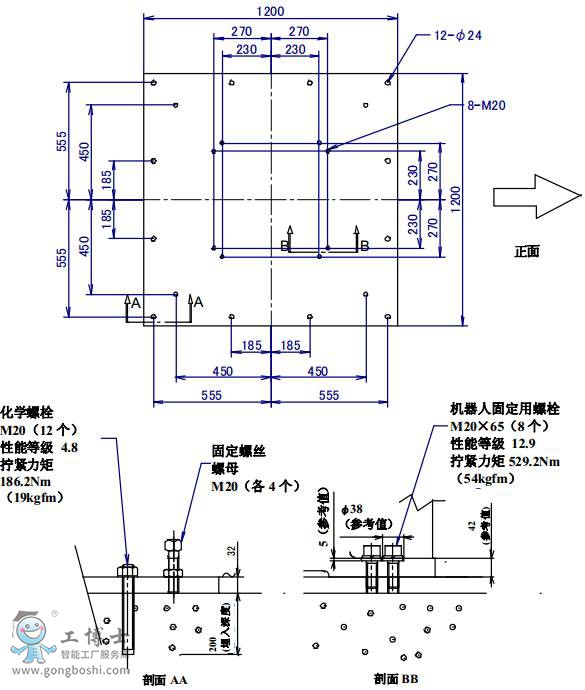
图8 R-2000IB机器人底座固定螺栓扭力要求
1.3 检查确认机器人本体整洁
清洁表面堆积物,平衡器等连杆和轴承周围进入切屑或飞溅物将导致异常磨损,手腕油封进入切屑或飞溅物将导致漏油。焊接电缆、焊***与手臂间是否存在异常磨损。
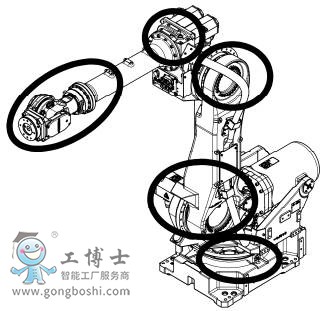
图9 定期清洁部位
2. 机器人控制柜状态确认
2.1 TP电缆有无压坏破损,电缆与TP接头连接是否可靠。TP电缆是否过度扭曲。

图10 TP电缆及接头检查
2.2 控制柜出风口是否积聚大量灰尘,造成通风不良。

图11 控制柜进出风口
2.3 控制柜内风扇是否正常转动。

图12 背板槽单元风扇检查
2.4 控制柜到本体连接电缆(RCC)是否有压坏破损,控制柜地面、走线槽内是否积水。

图13 RCC电缆检查
2.5 控制器急停按钮、外围急停按钮、安全光栅、围栏动作信号是否有效。

图14 外围设备急停安全设施检查
2.6 记录机器人零位置数据。

图15 机器人MASTER数值
2.7 记录机器人参考位置(工作原点)数据。
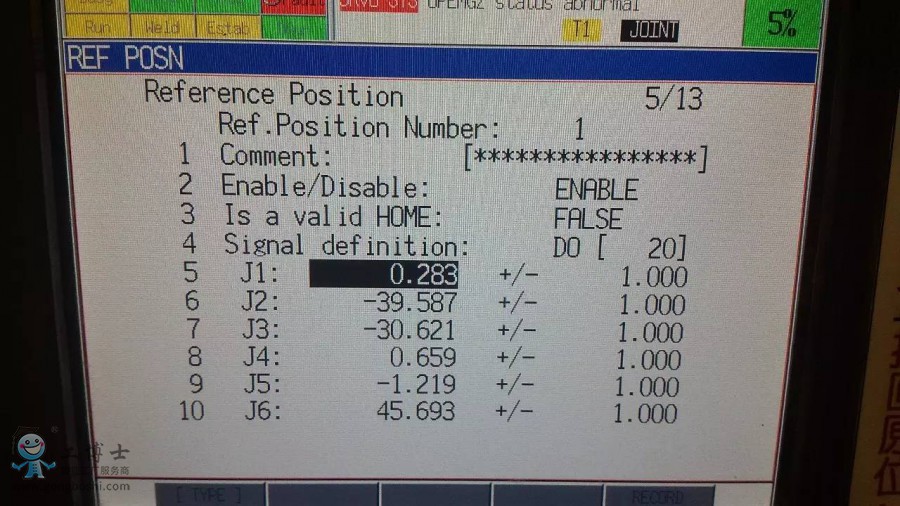
图16 备参考位置(工作原点)数值
2.8 记录机器人工具坐标系(TCP)数据。
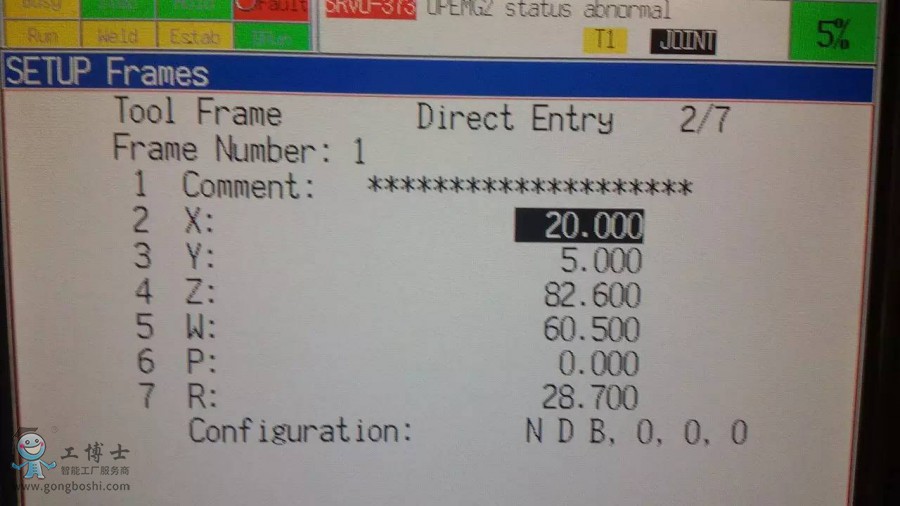
图17 工具坐标系数值
更多信息请咨询:发那科折弯机器人
- 下一篇:发那科机器人的选型参考——发那科机器人
- 上一篇:发那科机器人的折弯系统以及他的特点