
 产品:36
产品:36

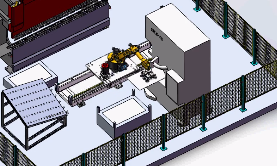
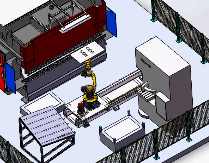
发那科折弯机器人:看一看折弯系统完整工作站有哪些配置?
自动发那科折弯机器人一个完整的工作周期包括取料、折弯、堆垛三个阶段;取料阶段指自动折弯机器人首先从进料站上抓起钢板,伸进厚度传感器检查一下,如果确实只拿起了一块钢板,就将其置于定位台上,松开夹具再重新抓起。
折弯阶段是核心,由一系列折弯操作完成,折弯时,机器人可以跟随或者不跟随。所谓跟随就是指夹具始终抓住工件,随着工件逐渐弯曲,机器人也同步做圆弧运动。
发那科折弯机器人圆心在凸模的刃口上,半径由夹具在工件上的位置决定,圆弧终点由折弯角度决定,需要注意的是跟随并不都是向上运动的,有时也会向下运动。而“不跟随”指自动折弯机器人先松开工件,待折弯动作完成后,再到新的位置抓住工件。此方式因为不利于提高产品质量,时间上也不如“跟随”方式紧凑,所以应用不多。有时,折弯后取出工件时,还要向上举工件,以免凸模碰撞。两次折弯操作之间,机器人可能还要用翻面架调整抓取点,全面折弯完成后即进入堆垛阶段,把产品整齐堆放在出料站上。为了节省空间并避免倒垛,要按一定次序堆放。